
Nutzen Sie das Fachwissen im
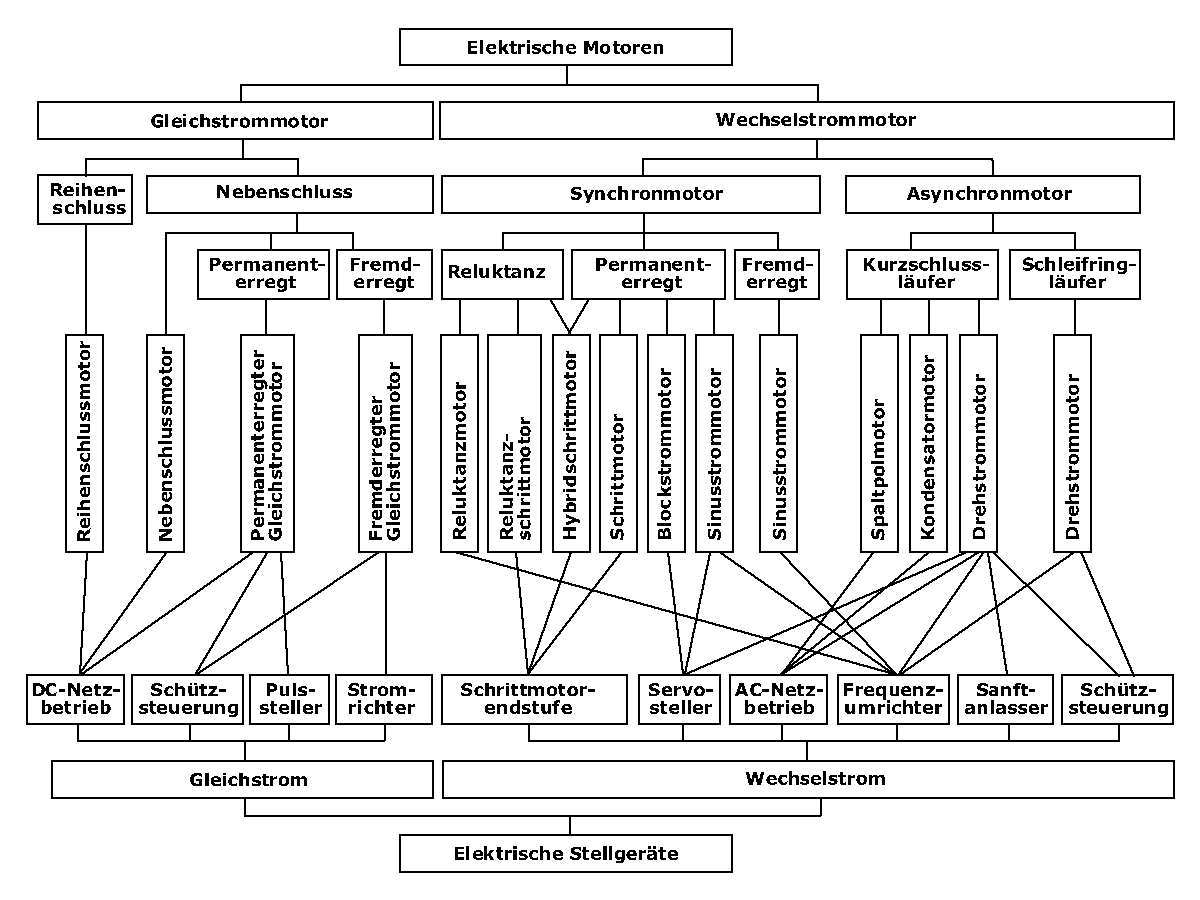
Den richtigen elektrischen Antrieb finden
![]() Der zertifizierte Onlinekurs "Auslegung elektrischer Antriebe" richtet sich an Facharbeiter, Techniker und Ingenieur
Der zertifizierte Onlinekurs "Auslegung elektrischer Antriebe" richtet sich an Facharbeiter, Techniker und Ingenieur e, die elektrische Antriebe während der Konstruktion von Maschinen und Anlagen auswählen müssen oder bestehende Antriebslösungen nachrechnen wollen.
e, die elektrische Antriebe während der Konstruktion von Maschinen und Anlagen auswählen müssen oder bestehende Antriebslösungen nachrechnen wollen.
Im Kurs wird großer Wert auf die praktische Anwendung des Gelernten gelegt. Anhand viele durchgerechneter Beispiele wird die Vorgehensweise intensiv geübt. Sie werden befähigt,
- die Systematik der Antriebsauslegung auf Ihre eigenen Auslegungsaufgaben zu übertragen,
- die notwendigen Rechenschritte selbständig durchzuführen und
- Ihre Auswahl des Getriebes, des Motors sowie des Stellgerätes verständlich und nachvollziehbar zu dokumentieren.
Der Kurs besteht aus 2 Kurseinheiten, die am besten nacheinander bearbeitet werden. Sämtliche Kursmaterialien stehen im persönlichen Kursraum zur Verfügung. Sie umfassen:
- die Kursbücher zum Download als PDF-Dateien (Leseprobe),
- die Übungsaufgaben für den persönlichen Wissenstest, die online bearbeitet werden (Leseprobe),
- das Auslegungsprogramm DriveCreator zur rechnergestützten Auslegung elektrischer Antriebe,
- die Prüfungsaufgaben zum Erreichen des Abschlusszertifikates, die ebenfalls online bearbeitet werden.
Zusätzlich können Sie ohne Zusatzkosten je Kurseinheit eine online-Konsultation bei ihrem Kursbetreuer buchen und im persönlichen Gespräch offene Fragen klären.
Die Bearbeitung des Kurses dauert etwa 60 Stunden und kann innerhalb von 6-8 Wochen erfolgen. Der Kurs selbst steht Ihnen 6 Monate online zur Verfügung, so dass Sie die Bearbeitungsdauer bei Bedarf verlängern können.
Der Kurs endet mit den online durchgeführten Prüfungen. Die erfolgreiche Teilnahme wird mit einem Zertifikat dokumentiert.
Der Kurs wurde durch die Staatliche Zentralstelle für Fernunterricht (ZFU) geprüft und unter der Zulassungsnummer 7356419 zugelassen.
Der Kurs unterliegt dem deutschen Fernunterrichtsschutzgesetz und erfordert deshalb den Abschluss eines Fernunterrichtsvertrages. Senden Sie uns den ausgefüllten und unterschriebenen Vertrag zu. Wir legen anschließend Ihren persönlichen Kursraum an und schalten Ihre Kursmaterialien frei.
Mathematische Grundlagen
Auswahl der optimalen Antriebslösung
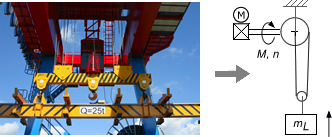
Bewegungsabläufe für typische mechanische Lasten
Übungen
|
Übungen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73
99 715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum, AGB Onlinekurse, Datenschutzerklärung