Präsenzkurs "Elektrische Antriebstechnik"
 Der Präsenzkurs "Elektrische Antriebstechnik" richtet sich an Facharbeiter, Techniker und Ingenieure, die grundlegende Kenntnisse der elektrischen Antriebstechnik erwerben oder auffrischen wollen.
Der Präsenzkurs "Elektrische Antriebstechnik" richtet sich an Facharbeiter, Techniker und Ingenieure, die grundlegende Kenntnisse der elektrischen Antriebstechnik erwerben oder auffrischen wollen.
Nach einer kurzen Wiederholung der elektrotechnischen Grundlagen erfolgt ein Überblick über die am Markt verfügbaren elektrischen Antriebslösungen.
Anschließend werden alle Typen von elektrischen Antrieben behandelt. Beginnend bei den elektrischen den Motoren über die zugehörigen Stellgeräte und Geber wird für jeden Antriebstyp die Funktionsweise anschaulich erklärt. Der Schwerpunkt liegt dabei auf dem Verstehen der inneren Zusammenhänge und weniger auf der ausführlichen mathematischen Beschreibung.
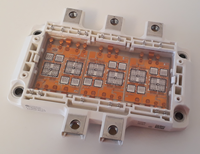
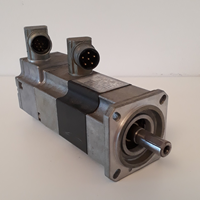
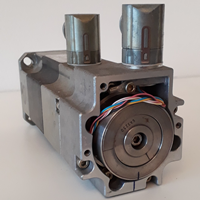
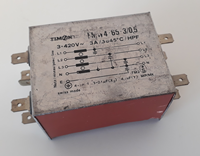
Eine große Anzahl an Antriebskomponenten werden als Anschauungsmaterial vorgeführt. So können die Teilnehmer elektrische Motoren, leistungselektronische Stellgeräte und Geber auch real "begreifen".
Demonstrationen an unseren virtuellen Testständen runden die Präsentation ab. Praktische Übungen an Frequenzumrichtern festigen das Gelernte.
Der Kurs geht über 3 Tage und findet in einem Tagungshotel in Nürnberg statt. Bei rechtzeitiger Anmeldung können Zimmer im gleichen Hotel gebucht werden.
Alle Teilnehmer erhalten ein gedrucktes Exemplar der Kursunterlagen. Die Verpflegung während des Kurses ist im Preis inbegriffen.
Hier finden Sie unser Anmeldeformular (PDF) und hier den Zeitplan (PDF) zum Download.
Tag 1
Uhrzeit |
Thema |
8.30-10.00 |
Elektrotechnische Grundlagen für elektrische Antriebe
- Elektrische Stromkreise
- Erzeugung magnetischer Felder in Elektromotoren
- Kraftwirkung auf stromdurchflossene Leiter, Erzeugung des Drehmomentes in Elektromotoren
- Induktion elektrischer Spannungen, Bedeutung der "Elektromotorischen Kraft" (EMK) für elektrische Antriebe
|
10.30-12.00 |
 Elektrische Antriebe im Überblick Elektrische Antriebe im Überblick
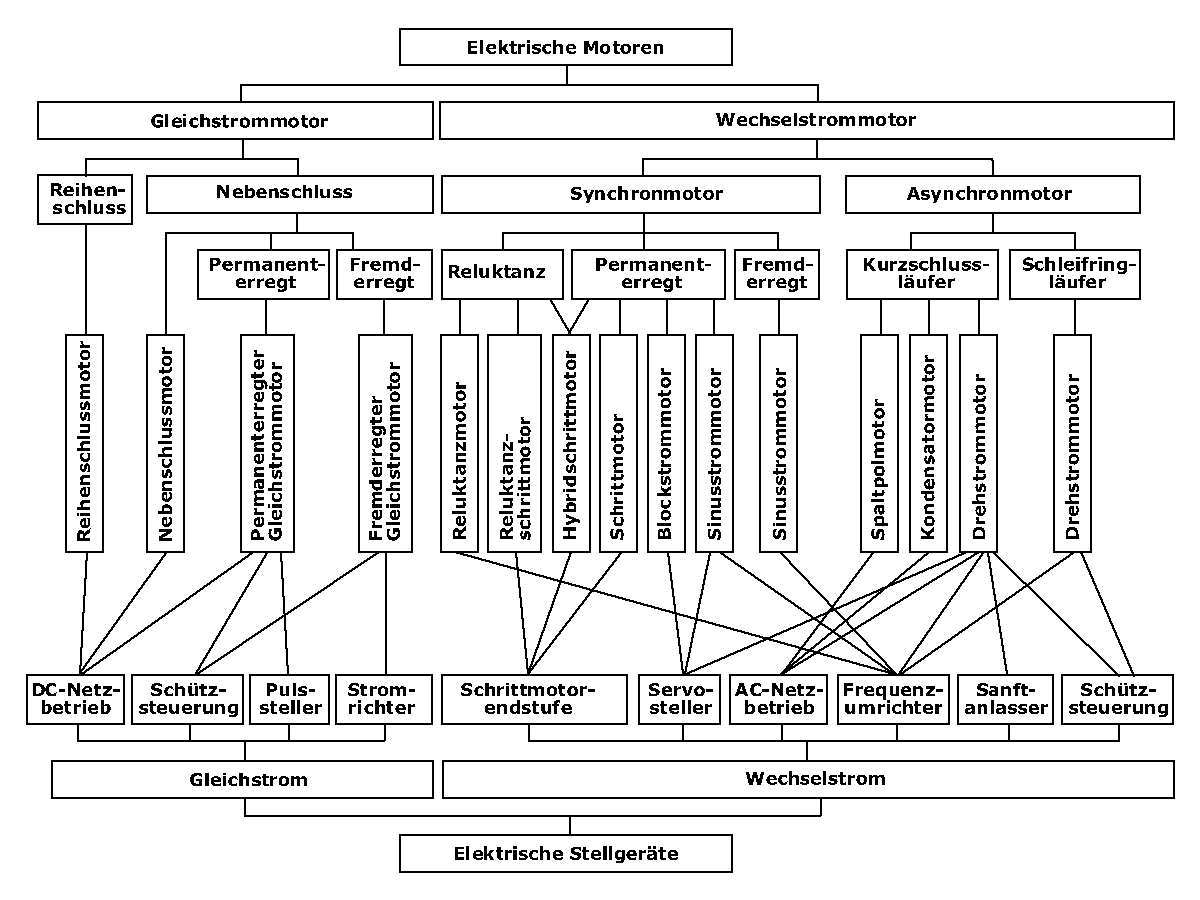
- Der Aufbau elektrischer Antriebe (Motor, Getriebe, Geber, Stellgerät, Steuerung/Regelung)
- Systematik elektrischer Antriebe
- Überblick über die verfügbaren Antriebslösungen
- Unterscheidung zwischen Konstantantrieben, drehzahlveränderlichen Antrieben und Servoantrieben
Gleichstromantriebe
- Der Gleichstrommotor
- Funktionsweise
- Typen von Gleichstrommotoren
|
13.00-14.30 |
- Drehzahl-Drehmomentkennlinie und Ansätze zur Drehzahlverstellung bei Gleichstrommotoren
 Stellgeräte für Konstantantriebe mit Gleichstrommotor Stellgeräte für Konstantantriebe mit Gleichstrommotor
- Funktionsweise
- Anlauf mit Vorwiderständen
- Stellgeräte für drehzahlveränderliche Antriebe und Servoantriebe mit Gleichstrommotor
- Aufbau und Funktionsweise eines Stromrichters
- Stellgeräte für Servoantriebe mit Gleichstrommotor
- Aufbau und Funktionsweise eines Pulsstellers
|
15.00-16.30 |
 Exkurs Bedienen und Beobachten von elektrischen Antrieben Exkurs Bedienen und Beobachten von elektrischen Antrieben
- Anwender-Schnittstelle, Bedienfeld, Parametrierung
- Aufbau der Antriebsregelung/-steuerung
- Steuerkommandos und Zustandsmeldungen
- Parameterstruktur
Übungen am Teststand
- Rücksetzen der Parameter auf Werkseinstellung
- Grundinbetriebnahme eines elektrischen Antriebes
|
Tag 2
Uhrzeit |
Thema |
8.30-10.00 |
 Wechselstromantriebe mit Asynchronmotor Wechselstromantriebe mit Asynchronmotor
- Der Asynchronmotor
- Funktionsweise
- Typen von Asynchronmotoren
- Drehzahl-Drehmomentkennlinie und Ansätze zur Drehzahlverstellung bei Asynchronmotoren
|
10.30-12.00 |
 Stellgeräte für Konstantantriebe mit Asynchronmotor Stellgeräte für Konstantantriebe mit Asynchronmotor
- Direktstarter
- Stern-Dreieck-Anlauf
- Sanftstarter
- Stellgeräte für drehzahlveränderliche Antriebe mit Asynchronmotor
- Schützsteuerungen
- Aufbau und Funktionsweise eines Frequenzumrichters
|
13.00-14.30 |
 Wechselstromantriebe mit Synchronmotor Wechselstromantriebe mit Synchronmotor
- Der fremd erregte Synchronmotor
im Überblick
- Der permanent erregte Synchronmotor
- Funktionsweise
- Typen von permanent erregten Synchronmotoren (Bürstenlose Gleichstrommotoren, Motoren mit Sinuskommutierung, Linearmotoren, Torquemotoren, Reluktanzmotoren)
- Drehzahl-Drehmomentkennlinie und Ansätze zur Drehzahlverstellung bei permanent erregten Synchronmotoren
- Stellgeräte für Servoantriebe mit permanent erregtem Synchronmotor
- Der bürstenlose Gleichstrommotor
- Der Synchronmotor
- Der Linear- und Torquemotor
- Stellgeräte für Servoantriebe
|
15.00-16.30 |
 Antriebe mit Schrittmotor im Überblick Antriebe mit Schrittmotor im Überblick
- Der Schrittmotor
- Stellgeräte für Antriebe mit Schrittmotor
Übungen am Teststand
- Aufnahme der U/f-Kennlinie eines Antriebes mit Asynchronmotor und Frequenzumrichter
|
Tag 3
Uhrzeit |
Thema |
8.30-10.00 |
 Regelung elektrischer Antriebe Regelung elektrischer Antriebe
- Steuerung und Regelung
- Gesteuert betriebene elektrische Antriebe
- Der spannungsgesteuerte Gleichstrommotor
- Der U/f-gesteuerte Asynchronmotor
- Der U/f-gesteuerte Synchronmotor
- Geregelt betriebene elektrische Antriebe
- Regelkreise bei elektrischen Antrieben
- Der drehzahlgeregelte Gleichstrommotor
- Der drehzahlgeregelte Asynchronmotor mit vektorieller Stromregelung
- Der drehzahlgeregelte Synchronmotor mit vektorieller Stromregelung
- Regleroptimierung für elektrische Antriebe im Überblick
|
10.30-12.00 |
 Drehzahl- und Lagegeber (Motorgeber) Drehzahl- und Lagegeber (Motorgeber)
- Systematik von Drehzahl- und Lagegebern
- Unterscheidung nach der Messgröße
- Unterscheidung nach dem Messprinzip
- Unterscheidung nach der Signalübertragung
- Der Analogtacho
- Der Resolver
- Der optische Geber
- Der magnetische Geber
|
13.00-14.30 |
Technologische Funktionen und Einbindung elektrischer Antriebe in die Automatisierung im Überblick
- Elektrische Antriebe als Technologieregler
- Motion Control
- Positionieren
- Synchronisieren (elektronische Welle, elektronisches Getriebe, elektronische Kurvenscheibe)
- Sicherheitsfunktion
- Veranlassung
- Integrierte Funktionen
- Feldbusse/serielle Schnittstellen
- Funktionsweise
- Taktsynchronität, Querverkehr
|
15.00-16.30 |
 EMV EMV
- Veranlassung
- Elektrische Antriebe als Störquelle und als Störsenke
- EMV-Regeln, EMV-Maßnahmen
|